GS-ICP-SLAM
3D-Punktwolkenverarbeitung mit GS-ICP-SLAM-Algorithmus
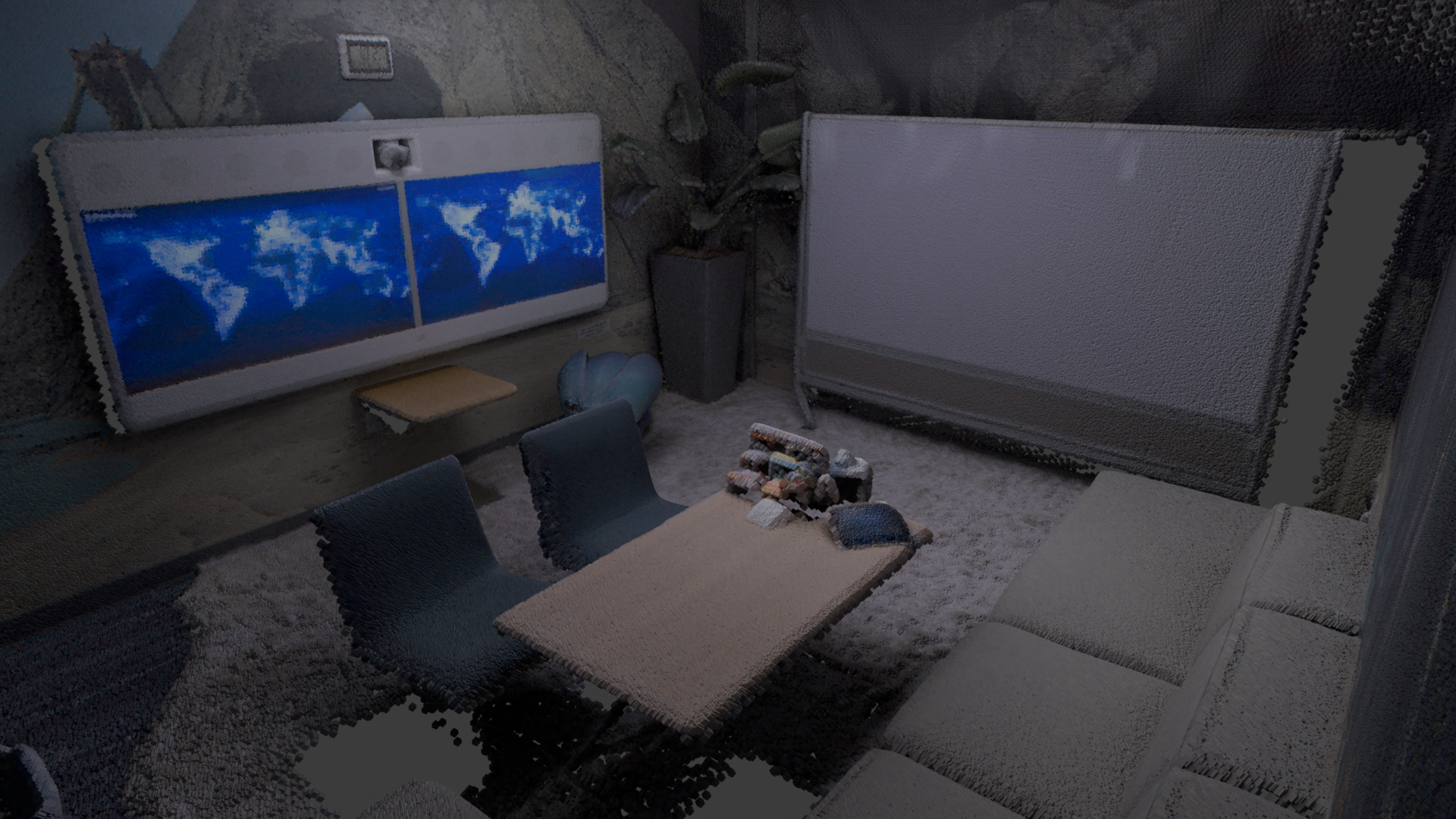
In diesem Projekt hat unsere Gruppe ein SLAM-System basierend auf dem sogenannten Gaussian Splatting und dem Generalized-ICP-Algorithmus aufgesetzt und erweitert. Ziel war es, die Methodik aus einem wissenschaftlichen Paper im Detail nachzuvollziehen und das System anschließend um die Verarbeitung von RGB-D-Livedaten zu erweitern.
Technologien & Tools
- Python
- 3D Gaussian-Splatting (3DGS)
- Generalized-Iterative-Closed-Point (G-ICP)
- Simultaneous Localization and Mapping (SLAM)
- Unity
Highlights
- Implementierung und Erweiterung des GS-ICP-SLAM-Algorithmus eines wissenschaftlichen Papers
- Visualisierung von eingehenden RGB-D Bildern in einer Gaussian-Wolke
- Umsetzung einer VR-Umgebung in Unity basierend auf der 3D-Punktwolke des Algorithmus
- Arbeit im Team mit fünf Personen
Links